Hosted by OSOS , contributed by Karas Al on 10 December 2019
 Η δυνατότητες που έχει το ανθρώπινο χέρι είναι ένας από τους λόγους που ο άνθρωπος έχει εξελιχθεί σε τόσο μεγάλο βαθμό. Οι περιορισμοί όμως που έχει το ανθρώπινο σώμα είναι ένα εμπόδιο που πρέπει να ξεπεραστεί με την βοήθεια της σύγχρονης τεχνολογίας. Για να μπορέσουμε να συμβάλουμε στην περαιτέρω εξέλιξη και πρόοδο της ανθρωπότητας σκεφτήκαμε να κατασκευάσουμε έναν ρομποτικό βραχίονα που να αντιγράφει τις κινήσεις του χεριού μας χρησιμοποιώντας αυτοσχέδιους αισθητήρες κάμψης δίνοντας την δυνατότητα να χρησιμοποιήσουμε τα χέρια μας σε μέρη μακρινά, επικίνδυνα ή απρόσιτα. Μπορούμε έτσι να εγχειρήσουμε από την μια άκρη του πλανήτη στην άλλη, να "αγγίξουμε" τα βάθη των θαλασσών, τις απρόσιτες βουνοκορφές ή ακόμα και ψηλαφίσουμε άλλους πλάνητες αναζητώντας τη γνώση ή παρέχοντας βοήθεια όπου χρειάζεται.
Η δυνατότητες που έχει το ανθρώπινο χέρι είναι ένας από τους λόγους που ο άνθρωπος έχει εξελιχθεί σε τόσο μεγάλο βαθμό. Οι περιορισμοί όμως που έχει το ανθρώπινο σώμα είναι ένα εμπόδιο που πρέπει να ξεπεραστεί με την βοήθεια της σύγχρονης τεχνολογίας. Για να μπορέσουμε να συμβάλουμε στην περαιτέρω εξέλιξη και πρόοδο της ανθρωπότητας σκεφτήκαμε να κατασκευάσουμε έναν ρομποτικό βραχίονα που να αντιγράφει τις κινήσεις του χεριού μας χρησιμοποιώντας αυτοσχέδιους αισθητήρες κάμψης δίνοντας την δυνατότητα να χρησιμοποιήσουμε τα χέρια μας σε μέρη μακρινά, επικίνδυνα ή απρόσιτα. Μπορούμε έτσι να εγχειρήσουμε από την μια άκρη του πλανήτη στην άλλη, να "αγγίξουμε" τα βάθη των θαλασσών, τις απρόσιτες βουνοκορφές ή ακόμα και ψηλαφίσουμε άλλους πλάνητες αναζητώντας τη γνώση ή παρέχοντας βοήθεια όπου χρειάζεται.
7ο Γυμνάσιο Καλαμάτας
Υπεύθυνος Καθηγητής:
Αλέξανδρος Καραβλίδης
להרגיש
Το ανθρώπινο χέρι
Το ανθρώπινο χέρι είναι ένα πολύπλοκο και πολυμήχανο εργαλείο που μας δίνει τη δυνατότητα να δημιουργήσουμε, να εκφραστούμε και να επικοινωνήσουμε με τους συνανθρώπους μας.
Οι διάφοροι πολιτισμοί που έχουν αναπτυχτεί στον πλανήτη μας, τα έργα τέχνης η μουσική και οποιοδήποτε ανθρώπινο δημιούργημα που βλέπουμε γύρω μας δεν θα υπήρχε αν οι άνθρωποι δεν είχαν τα επιδέξια χέρια τους.
Σε αυτά τα πολύτιμα εργαλεία σκεφτήκαμε να δώσουμε την δυνατότητα να ξεπεράσουν τα όρια του ανθρώπινου σώματος ώστε να κινούνται πέρα από αυτό, επεκτείνοντας τις δυνατότητες μας πέρα από τα φυσικά ανθρώπινα όρια και περιορισμούς. 
לדמיין
Η ιδέα μας
Η ιδέα μας έχει αμέτρητες εφαρμογές, μπορεί να χρησιμοποιηθεί σε ρομποτικά συστήματα για την εξερεύνηση του βυθού της θάλασσας ή των ηφαιστείων ή ακόμα και των απόμακρων πλανητών. Μπορεί επίσης να χρησιμοποιηθεί στην τηλεϊατρική δίνοντας τη δυνατότητα σε ένα γιατρό να εγχειρήσει έναν ασθενή ακόμα και αν είναι στην άλλη άκρη του κόσμου, ή ακόμα και να αντικαταστήσει το χέρι ενός ανθρώπου που το έχασε από κάποιο ατύχημα.

יצירה
Υλοποίηση εργασίας
Για την υλοποίηση της εργασίας μας συνεργαστήκαμε και αφού συλλέξαμε τις απαραίτητες πληροφορίες αρχίσαμε να ετοιμάζουμε τα μέρη της κατασκευής.
Πρώτα φτιάξαμε τους αισθητήρες κάμψης που μετατρέπουν την κίνηση των δακτύλων σε ηλεκτρικά σήματα που μπορούν να "διαβαστούν" από το Arduino.
Για να φτιάξουμε τους αισθητήρες πειραματιστήκαμε με διάφορα υλικά, όπως αυτοκόλλητες ταινίες, χαρτιά διαφορετικών τύπων, διαφορετικά είδη μολυβιών αφού ο γραφίτης που περιέχουν μπορεί να δημιουργήσει μεταβλητές αντιστάσεις. Τελικά όμως καταλήξαμε να χρησιμοποιήσουνε ένα υλικό που λέγεται Velostat και έχει πιο σταθερή συμπεριφορά από ό,τι ο γραφίτης των μολυβιών.
Αλλά τα πειράματα δεν τέλειωσαν εδώ. Έπρεπε να βρούμε το κατάλληλο υλικό που θα περιβάλει τον αισθητήρα, το κατάλληλο σύρμα που θα μεταφέρει το ρεύμα από το Arduino στον αισθητήρα και θα επιστρέφει την τιμή ανάλογα με την κάμψη των δακτύλων.
Έπειτα από καμία πενηνταριά πειράματα καταλήξαμε στους συγκεκριμένους αισθητήρες που εξωτερικά έχουν γκρίζα αυτοκόλλητη ταινία, εσωτερικά μια στρώση Velostat, δυο χάλκινες ταινίες εκατέρωθεν στις άκρες των οποίων είναι κολλημένο από ένα σε κάθε ταινία καλώδιο jumper.
Η λειτουργία των αισθητήρων βασίζεται στο ότι όσο περισσότερη πίεση δέχονται από τα δάκτυλα μας, τόσο μικραίνει η αντίσταση του ρεύματος που περνά μεταξύ των αγώγιμων χάλκινων ταινιών. Η μεταβολή της αντίστασης μπορεί εύκολα να μετρηθεί και να χρησιμοποιηθεί ως ένδειξη της ποσότητας πίεσης που εφαρμόζεται από μια αναλογική θύρα στο Arduino. Ευτυχώς είχε αρκετές αναλογικές θύρες αλλιώς θα "κόβαμε" κανένα δάκτυλο!
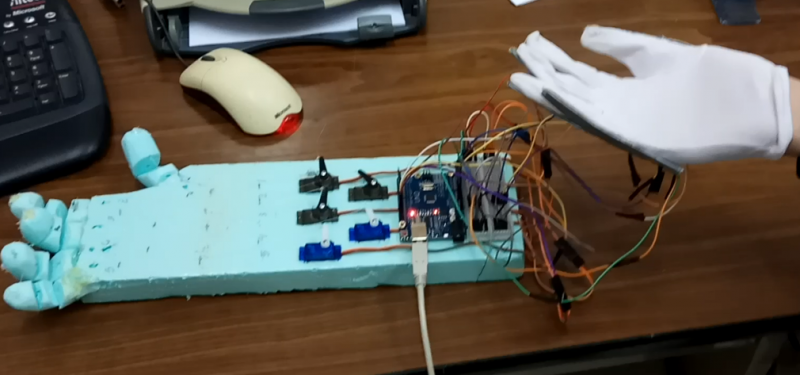
Στην συνέχεια συνδέσαμε τους αισθητήρες και τα σέρβο στην πλακέτα Arduino Uno και ξεκινήσαμε να ετοιμάζουμε τον κώδικα. Και αφού σβήσαμε και γράψαμε, δοκιμάσαμε και ξαναδοκιμάσαμε, κάναμε πολλές δοκιμές και λάθη άλλα δεν το βάλαμε κάτω. τελικά καταφέραμε να κάνουμε τα σέρβο να αντιδρούν ανάλογα με την κίνηση των αισθητήρων.
Στην συνέχεια έπρεπε να δημιουργήσουμε τα δάκτυλα, να τα συνδέσουμε στο χέρι και να βρούμε τρόπο ώστε να ανοιγοκλείνουν ανάλογα με την κίνηση που κάνουν τα σέρβο. Για τον σκοπό αυτό χρησιμοποιήσαμε Φελιζόλ Dow, που το κόψαμε σε κατάλληλες διαστάσεις το τρίψαμε με γυαλόχαρτο και στο πίσω μέρος βάλαμε λαστιχάκια για να επαναφέρει το κάθε δάκτυλο στην θέση του, όταν δεν το τραβά το σέρβο. Όταν ολοκληρώσαμε την συναρμολόγηση των αισθητήρων το χέρι άρχισε να κινείται
שיתוף
Συναισθήματα
Ωστόσο παρά την ικανοποίηση που νιώσαμε όταν είδαμε τα δάκτυλα του μηχανικού χεριού να ανοιγοκλείνουν απογοητευτήκαμε λίγο, γιατί συνειδητοποιήσαμε ότι το ανθρώπινο χέρι είναι τελικά πολύ πιο πολύπλοκο από ό,τι φανταζόμασταν και θα χρειαζόταν ακόμα μερικές δεκάδες αισθητήρες και σέρβο και πολύ περισσότερος χρόνος για να το κάνουμε να κινείται όπως πρέπει.
Παρόλα αυτά ήταν μια ευχάριστη εμπειρία και μάθαμε πολλά και ενδιαφέροντα πράγματα χάρη στην ευκαιρία που μας δόθηκε από την SciCo και το πρόγραμμα Generation Next της Vodafone.
Το Βίντεο μας: