Hosted by OSOS , contributed by Mparekos on 12 June 2018
Κατασκευή χαμηλού κόστους αυτόνομου οχήματος για την αποκομιδή απορριμάτων από το προαύλιο του Σχολείου.
Οι μαθητές μελέτησαν το πρόβλημα και κατέληξαν σε ένα αρχικό μινι μοντέλο οχήματος που ελέγχεται από τον μικροελεγκτή Arduino. Επέλεξαν τα υλικά που απαιτούνται, επινόησαν κατασκευαστικές λεπτομέρειες, έκαναν τις ηλεκτρικές συνδέσεις και προγραμμάτισαν το Arduino όχημα.
Το όχημα ανιχνεύει μικρού όγκου απορρίματα (όπως πχ σακουλάκια από συσκευασίες κρουασάν που ενδέχεται να βρίσκονται πεταμένα σε ένα προαύλιο Σχολείου), τα προσεγγίζει, τα συλλέγει με μηχανισμό δαγκάνας και τα μεταφέρει σε προκαθορισμένο σημείο αποκομιδής.
2ο ΓΥΜΝΑΣΙΟ ΣΑΜΟΥ
Tundke
Στο πρόγραμμα STEM που παρακολουθήσαμε, χρειάστηκε ως τελική εργασία να φτιάξουμε μια κατασκευή η οποία θα δίνει λύση σε ένα πρόβλημα της καθημερινότητας μας και παράλληλα θα έχει κοινωνικές προεκτάσεις. Αφού το σκεφτήκαμε, αποφασίσαμε ότι ένα τέτοιο σύνθετο πρόβλημα αφορά την αποκομιδή των απορριμάτων των οποίων ο όγκος τα τελευταία χρόνια ολοένα και αυξάνει.
Επίσης κατά τη διάρκεια της σχολικής ημέρας παρατηρούμε ότι κάποιοι μαθητές μάλλον δεν σέβονται το χώρο αλλά και την προσπάθεια της καθαρίστριας να κρατά καθαρό το Σχολείο μας, καθώς στα διαλείμματα βλέπουμε πεταμένα στο προαύλιο άδεια μπουκαλάκια νερού, χαρτάκια, συσκευασίες από κρουασάν και άλλα σκουπιδάκια παρότι υπάρχουν κάδοι απορριμάτων τριγύρω. Το ίδιο συμβαίνει σε μικρότερο βαθμό ακόμη και μέσα στις σχολικές αίθουσες παρότι υπάρχουν καλαθάκια για τα απορρίματα.
Σκεφτήκαμε ότι θα μπορούσαμε να κατασκευάσουμε ένα αυτόνομο όχημα αποκομιδής των απορριμάτων το οποίο θα μπορούσε να ενεργοποιείται στα διαλείμματα και να καθαρίζει μια σχολική αίθουσα ή ακόμη και το προαύλιο του Σχολείου. Κατ' αυτό τον τρόπο θέλουμε κυρίως να ευαισθητοποιήσουμε τους συμμαθητές μας και να αναδείξουμε τη δυσκολία που αντιμετωπίζει ένα ρομποτάκι αλλά και η καθαρίστρια του Σχολείου μας (η οποία δεν είναι ρομποτ) ενώ όλα θα ήταν πιο απλά αν όλοι κάναμε ότι έπρεπε δηλαδή πετάγαμε τα άχρηστα κατευθείαν στους κάδους και όχι οπουδήποτε αλλού.
Το όχημά μας θα είναι αυτόνομο δηλαδή θα κινείται με μπαταρίες με κάποιο πρόγραμμα που θα τρέχει στο "μυαλό" του, στην πλακέτα Arduino. Θα πρέπει να ανιχνεύει τα μικρού όγκου απορρίμματα, να τα συλλέγει με μια δαγκάνα και μετά να τα οδηγεί προς ένα προκαθορισμένο σημείο συλλογής, διευκολύνοντας την καθαρίστρια του Σχολείου μας.
Χαρήκαμε που συνεργαστήκαμε στις STEM συναντήσεις και που ανακαλύψαμε και μάθαμε καινούρια πράγματα!
Τα μέλη της ομάδας, οι μαθητές:
Αντωνίου Ωρίων, Γιαννικάκης Θανάσης και Παπαγεωργίου Γιάννης.
Kujutage ette
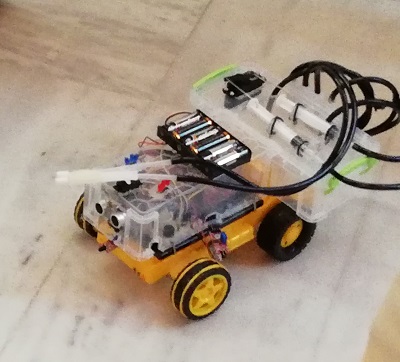
Καθώς προηγήθηκε η συμμετοχή μας στον Διαγωνισμό εκπαιδευτικής ρομποτικής Aegean Robotics Competition 2018 στο Καρλόβασι της Σάμου, εκεί είχαμε παρακολουθήσει την παρουσίαση ενός παρόμοιου αυτόνομου πυροσβεστικού οχήματος το οποίο ανίχνευε την αύξηση θερμοκρασίας (εστία φωτιάς) και προσέγγιζε για κατάσβεση με τις αντλίες νερού που κουβαλούσε. Το όχημα αυτό αποτέλεσε πηγή έμπνευσης για εμάς καθώς σκεφτήκαμε ότι αν προσαρμόζαμε μια δαγκάνα στο μπροστινό μέρος θα μπορούσε το δικό μας να συλλέγει τα απορρίματα.
Γνωρίζαμε ότι μπορούσαμε να κάνουμε έναν μηχανισμό δαγκάνας που θα ανοιγοκλείνει καθώς ήδη είχαμε φτιάξει παρόμοιους μηχανισμούς με κιτ ρομποτικής LEGO EV3 Mindstorms και με Gigo S4A Programming Bricks. Απλά θα χρειαζόμασταν ένα μηχανισμό δαγκάνας και να προσαρμόσουμε ένα σερβομοτερ για την κίνηση.
Ρομποτικός μας βραχίονας με Gigo S4A Programming Bricks (video)
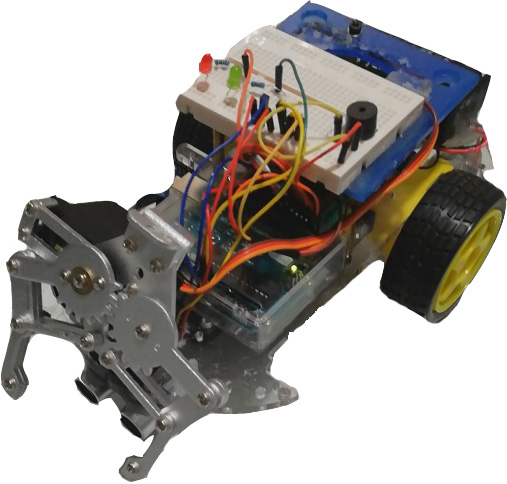
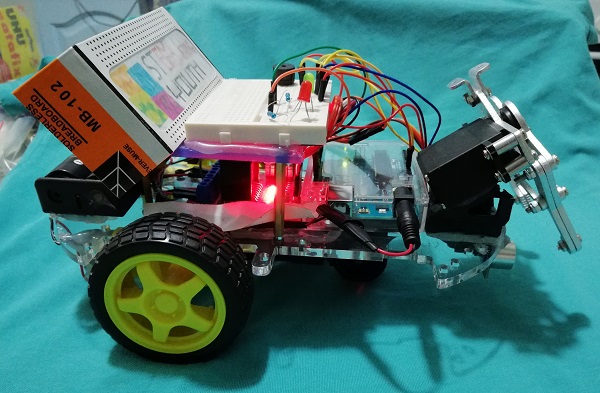
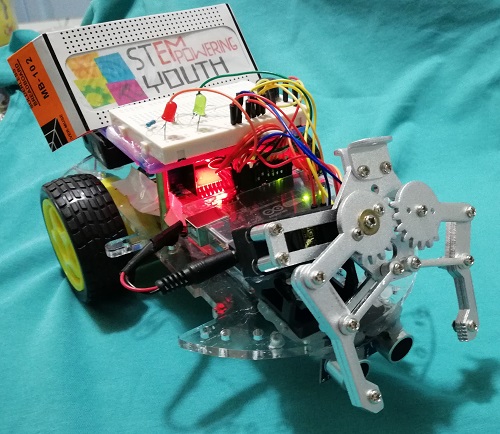
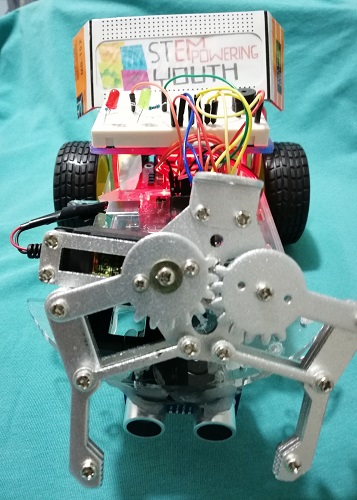
Το Όχημα Αποκομιδής Απορριμάτων που κατασκευάσαμε
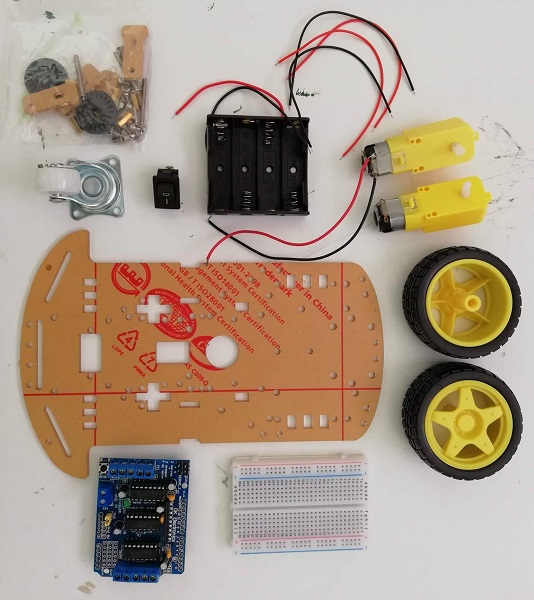
Υλικά που χρησιμοποιήσαμε
- Πλακέτα Arduino Uno
- Καλώδια (jumper wires) και μικρή πλακέτα σύνδεσης (breadboard)
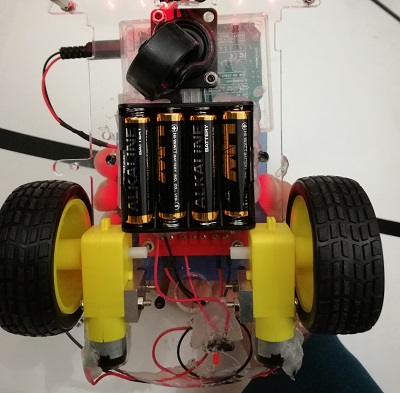
- 1 μπαταριοθήκη 2x18650 με επαναφορτιζόμενες μπαταρίες 2x3,7V για τροφοδοσία της γέφυρας των 2 DC μοτερ και του servo
- 1 κοινή μπαταριοθήκη 4xAA μπαταρίες 4x1,5V για ξεχωριστή τροφοδοσία του Arduino (τα μοτερ & το servo έχουν υψηλές ανάγκες τροφοδοσίας και δεν δουλεύουν διαφορετικά)
- Δύο αισθητήρες υπερύθρων Obstacle Avoidance Sensor Module w/ TCRT5000 για ανίχνευση της μαύρης γραμμής ώστε το όχημα να οδηγείται στον κάδο αποκομιδής
- Έναν αισθητήρα υπερήχων HC-SR04 για ανίχνευση των απορριμάτων
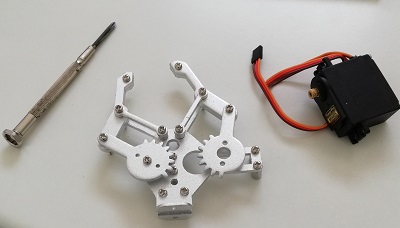
- Ένα σερβομοτερ για τη δαγκάνα MG995 High Speed Metal Gear Servo for Arduino
- Μια μεταλλική δαγκάνα Metal Robotic Arm Gripper Robot Mechanical Claws Robot Accessories Compatible with MG995 SG5010
- Ένα beeper και 2 χρωματιστά LED για ειδοποίηση της κατάστασης του οχήματος
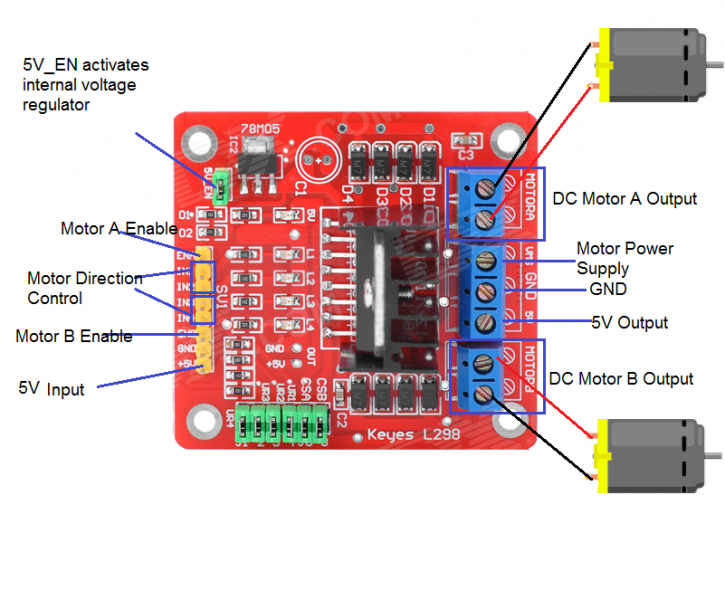
- Μία έτοιμη γέφυρα L298N Dual H-Bridge για την οδήγηση των 2 DC μοτερ
- Έναν On/Off διακόπτη
- Βίδες και πιστόλι θερμοκόλλησης για τη συγκράτηση των εξαρτημάτων
- Ένα κιτ με πλαστικο σασί οχήματος (robot chassis kit), 2 ρόδες και 2 DC μοτερ κίνησης και 1 μικρό ελεύθερης περιστροφής ροδάκι
Loo
Βήματα υλοποίησης
1. Κολλήσαμε τα καλωδιάκια με κολλητήρι στα 2 μοτερ κίνησης και τα στερεώσαμε με βίδες στο κάτω μέρος στο σασί του οχήματος. Μετά κολλήσαμε την πλακέτα της γέφυρας L298, τον On/Off διακόπτη και τις 2 μπαταριοθήκες με θερμοκόλληση.
2. Συνδέθηκαν τα καλώδια των μοτερ στη γέφυρα L298 καθώς και τα καλώδια της μπαταριοθήκης αφού μεσολάβησε ο On/Off διακόπτης.
3. Στερεώσαμε την πλακέτα Arduino στο πάνω μέρος του σασί και κάναμε τις απαραίτητες συνδέσεις προς την γέφυρα L298. Προγραμματίσαμε τις βασικές εντολές κίνησης του οχήματος (μπροστά, πίσω, στρίψε δεξιά...)
4. Συναρμολογήσαμε τη μεταλλική δαγκάνα και την προσαρμόσαμε με βίδες πάνω στο σερβομοτερ.
5. Κάναμε τις συνδέσεις με το Arduino και προγραμματίσαμε να ανοιγοκλείνει η δαγκάνα μας όπως στο βίντεο.
6. Προσαρμόσαμε τον αισθητήρα απόστασης (υπερήχων) ο οποίος θα ανιχνεύει τα απορρίματα, στο μπροστινό μέρος του οχήματος και όσο γίνεται χαμηλότερα στο έδαφος για να εντοπίζει όσο πιο μικρά αντικείμενα γίνεται. Έγινε ο προγραμματισμός & δοκιμές του αισθητήρα απόστασης, ώστε το όχημα να ακινητοποιείται όταν πλησιάζει σε κοντινή απόσταση ένα αντικείμενο.

7. Κατόπιν δοκιμών προσαρμόσαμε το μηχανισμό της δαγκάνας σε τέτοια θέση στο όχημα, ώστε όταν αυτή είναι ανοιχτή να μην εμποδίζει τον αισθητήρα απόστασης (υπερήχων) και σε σημείο τέτοιο ώστε όταν κλείνει να είναι όσο το δυνατόν πιο χαμηλά στο έδαφος για να πιάνει καλύτερα τα αντικείμενα.

Jaga
Αφού τον βαφτίσαμε... ο "Σκουπιδοπιάστρας" μας είναι έτοιμος να βγει να κυνηγήσει τα σκουπιδάκια.
Περάσαμε υπέροχα στη δράση, νιώσαμε περήφανοι που η κατασκευή μας λειτουργεί και την παρουσιάζουμε σε συμμαθητές μας.
Δείτε το όχημά μας εν ώρα δράσης! (video)
Ευχαριστούμε πολύ το Πρόγραμμα STEM powering Youth της SciCo που μας έδωσε αυτή τη δυνατότητα.