
Hosted by OSOS , contributed by titosmirnakis on 3 December 2018
Ένας αυτόματος κάδος σκουπιδιών (Auto Trash Bin). Υλοποιήθηκε από μαθητές του Γυμνασίου Βάμου στα πλαίσια του προγράμματος STEMpowering youth που έγινε στο Γυμνάσιο Βάμου υπό την καθοδήγηση του καθηγητή κ. Τίτου Σμυρνάκη.
Αισθάνομαι
Ένα συνηθισμένο πρόβλημα που αντιμετωπίζουμε σε μια σχολική αίθουσα είναι τα σκουπιδάκια των μαθητών που πέφτουν έξω από το καλαθάκι της τάξης. Κάποιοι μαθητές πετούν τα σκουπιδάκια από μακριά και ενώ πέφτουν απ έξω δεν ασχολούνται με το μάζεμα τους από το πάτωμα. Αυτό μας προβλημάτισε σαν ομάδα και σκεφτήκαμε τρόπους για την επίλυση του προβλήματος. Η ιδέα στην οποία και καταλήξαμε ήταν το «έξυπνο» καλαθάκι με αυτοματισμό ο οποίος θα ανοίγει και θα κλείνει το καπάκι όταν πλησιάζει το χέρι μας με το σκουπίδι που θέλουμε να πετάξουμε. Το «Auto Trash Bin» όπως ονομάσαμε το project μας, θα βοηθήσει στην επίλυση του προβλήματος, διότι θα κινήσει το ενδιαφέρον των μαθητών και βλέποντας το σαν ένα παιχνίδι δεν θα αφήνουν πλέον τα σκουπιδάκια τους στο πάτωμα.


Φαντάζομαι
Τα επόμενα βήματα μας ήταν ο σχεδιασμός του έργου, η αγορά των υλικών που απαιτούνται, η συναρμολόγησή τους και ο προγραμματισμός του Arduino. Κατά τον σχεδιασμό αποφασίσαμε ότι θα χρειαστούμε τα παρακάτω υλικά: ArduinoUNO, αισθητήρα απόστασης υπερήχων (HC-SR04), σερβομηχανισμό (servo), διακόπτης, μπαταρία 9V, καλώδια και φυσικά έναν πλαστικό κάδο σκουπιδιών. Η λειτουργία του “Auto Trash Bin” θα στηρίζεται στον αισθητήρα απόστασης ο οποίος όταν ανιχνεύει την ύπαρξη αντικειμένου (το χέρι μας) λίγα εκατοστά μπροστά από τον κάδο, θα θέτει σε κίνηση το servo το οποίο θα ανοίγει το καπάκι του κάδου και στη συνέχεια θα το κλείνει μόλις απομακρυνθεί το χέρι μας


Δημιουργώ
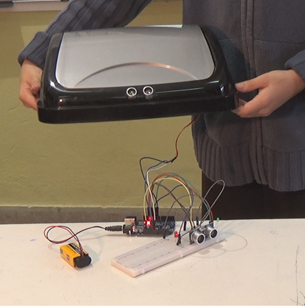
Τώρα ήρθε η ώρα της κατασκευής, αφού παραλάβαμε όλα τα υλικά μας και είμαστε έτοιμοι να προχωρήσουμε. Αφού πρώτα δοκιμάσουμε την συνδεσμολογία στο breadboard και προχωρήσουμε στον προγραμματισμό του Arduino, βλέπουμε αν το κύκλωμα λειτουργεί όπως το είχαμε σχεδιάσει. Στη συνέχεια, αφού όλα λειτουργούν σωστά προσπαθούμε να προσαρμόσουμε όλα τα υλικά στο καπάκι του κάδου μας. Τρυπάμε το καπάκι και τοποθετούμε τον αισθητήρα απόστασης, κολλάμε το Arduino και τη μπαταρία στη θέση τους, κολλάμε προσεχτικά τα καλώδια ώστε να μην εμποδίζουν και βάζουμε στο servo στη θέση του ώστε να ανοίγει το καπάκι. Τέλος βάζουμε και έναν διακόπτη, ώστε να μην καταναλώνει άσκοπα την μπαταρία όταν δεν χρειάζεται. Τοποθετούμε και τα λογότυπα μας στο εξωτερικό του κάδου και είμαστε έτοιμοι για την τελική δοκιμή



Μοιράζομαι
Ο «αυτόματος κάδος» μας είναι έτοιμος! Λειτουργεί όπως ακριβώς τον είχαμε σχεδιάσει. Πλησιάζει το χέρι μας και σε απόσταση 40cm περίπου ενεργοποιείται ο σερβομηχανισμός ο οποίος ανοίγει το καπάκι και ταυτόχρονα ανάβει ένα πράσινο LED. Στη συνέχεια καθώς απομακρύνεται το χέρι μας κλείνει το καπάκι και σβήνει το πράσινο LED.
Το βίντεο – παρουσίαση του project μας βρίσκεται στο κανάλι του Γυμνασίου Βάμου στο YouTube:
https://www.youtube.com/watch?v=aCFdL1j7GSg&feature=youtu.be
Παράλληλα είναι αναρτημένο στο Facebook του Γυμνασίου Βάμου: https://www.facebook.com/gymvamou/posts/961263454059400
καθώς και στην ομάδα «Πειράματα στο Γυμνάσιο Βάμου» στο Facebook: https://www.facebook.com/groups/321948484582955/
Σχετικό άρθρο για τα project του Γυμνασίου Βάμου δημοσιεύτηκε στα Χανιώτικα Νέα της Δευτέρας 28-1-2019: haniotika-nea28012019
ενώ η κατασκευή μας παρουσιάστηκε και στην τηλεόραση στο κανάλι NEATV στην εκπομπή "ΣΤΟ ΚΟΚΚΙΝΟ" : https://www.youtube.com/watch?v=zGwe_axEkiQ

Οι μαθητές της ομάδας είναι: Σήφης Κοτρωνάκης, Μιχάλης Αννιτσάκης, Ζεκίρ Λάμι και Παναγιώτης Βρώτσος όλοι μαθητές της Α΄ τάξης.
